
一、引言
工业机器人是一种能够自动执行工作的机器设备,它可以在各种环境中完成各种任务,如焊接、装配、搬运等。工业机器人的轴和坐标系是机器人运动控制的基础,了解它们的原理和应用对于机器人的编程和操作至关重要。
二、工业机器人的轴
- 轴的定义
- 工业机器人的轴可以为旋转轴也可以为平移轴,轴的运行方式由机械结构决定。
- 工业机器人轴分为机器人本体的运动轴和外部轴。
- 工业机器人外部轴又分为滑台和变位机。
- 如果不特别指明,工业机器人轴即指机器人本体的运动轴。
- 轴的运动方向
- 在关节坐标系下,机器人各轴进行单独动作。
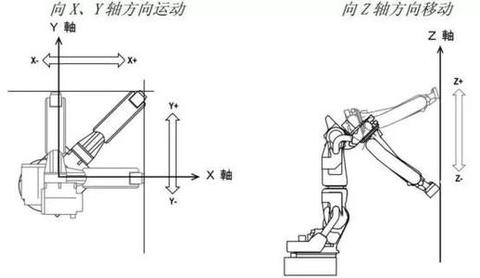
- 在直角坐标系下,机器人的控制中心点沿设定的 x、y、z 方向运行。
- 在工具坐标系下,工具坐标系位于机器人腕法兰盘的夹具上,由用户自己定义。夹具的有效方向定义为工具坐标系的 z 轴。
在用户坐标系下,用户坐标系位于机器人抓取的工件上,由用户自己定义。
三、工业机器人的坐标系
- 坐标系的种类
- 关节坐标系:机器人各轴进行单独动作,称为关节坐标系。
- 直角坐标系:机器人的控制中心点沿设定的 x、y、z 方向运行。
- 工具坐标系:工具坐标系位于机器人腕法兰盘的夹具上,由用户自己定义。夹具的有效方向定义为工具坐标系的 z 轴。
- 用户坐标系:用户坐标系位于机器人抓取的工件上,由用户自己定义。
- 坐标系的确定原则
- 机器人的各种坐标系都由正交的右手定则来决定1。
- 当围绕平行于 x、y、z 轴线的各轴旋转时,分别定义为 a、b、c。a、b、c 的正方向分别是 x、y、z 正方向上右手螺旋前进的方向1。
工业机器人常用坐标系
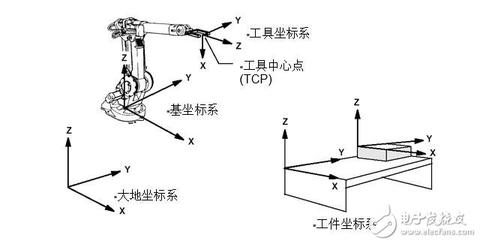
大地坐标系:大地坐标系是固定在空间上的标准直角坐标系,它被固定在事先确定的位置。用户坐标系是基于该坐标系而设定的1。
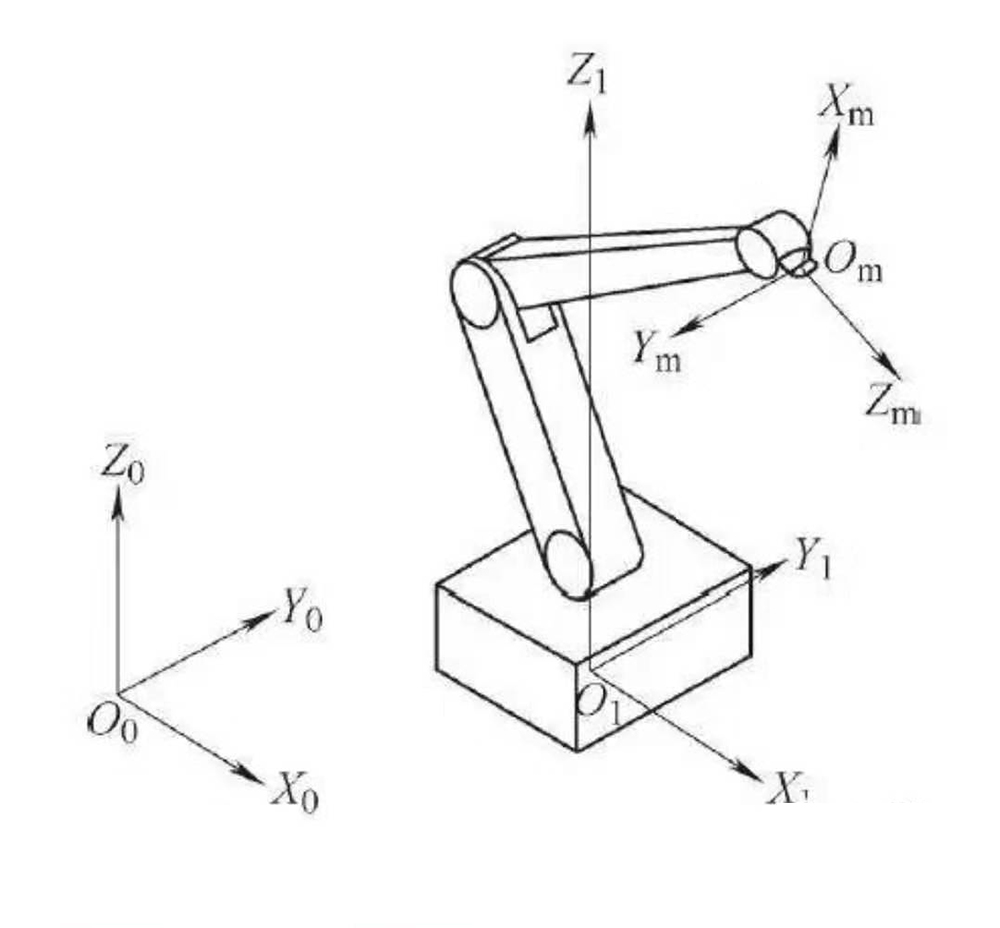
- 基坐标系:基坐标系由机器人底座基点与坐标方位组成,该坐标系是机器人其它坐标系的基础1。
- 关节坐标系:关节坐标系是设定在机器人关节中的坐标系,它是每个轴相对其原点位置的绝对角度1。
工具坐标系:工具坐标系用来确定工具的位姿,它由工具中心点与坐标方位组成。工具坐标系必须事先进行设定。在没有定义的时候,将由默认工具坐标系来替代该坐标系1。
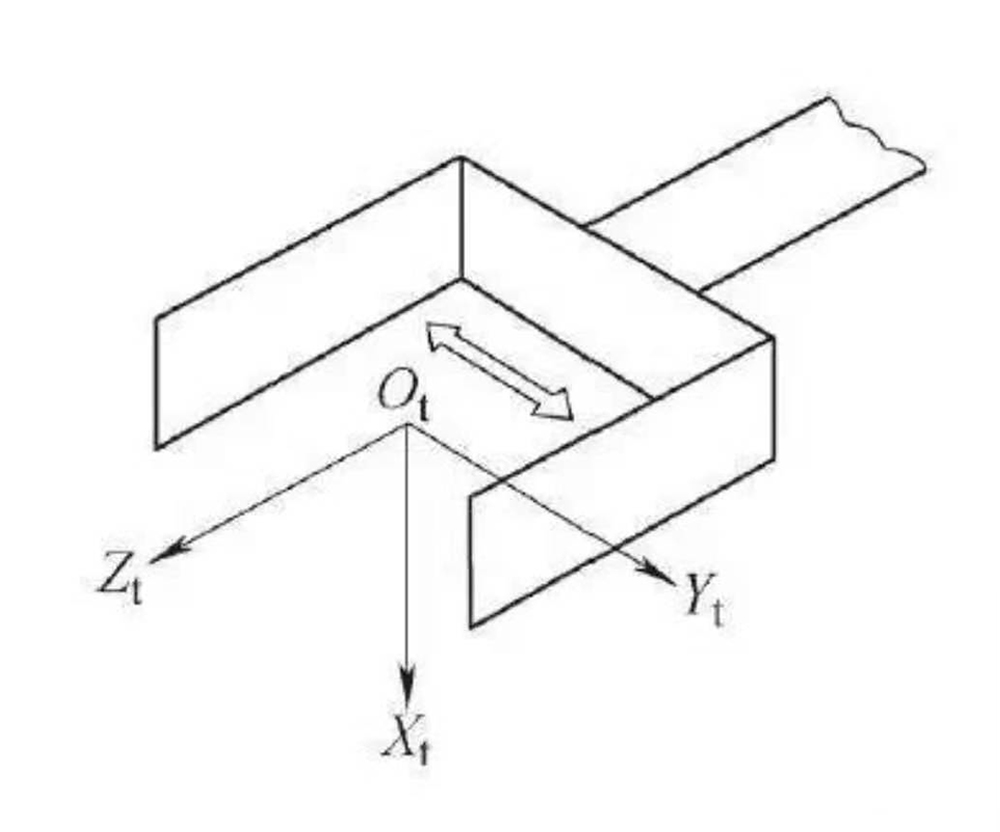
- 工件坐标系:工件坐标系用来确定工件的位姿,它由工件原点与坐标方位组成。工件坐标系可采用三点法确定:点 x1 与点 x2 连线组成 x 轴,通过点 y1 向 x 轴作的垂直线为 y 轴,z 轴方向以右手定则确定1。
用户坐标系:用户坐标系是用户对每个作业空间进行自定义的直角坐标系,它用于位置寄存器的示教和执行、位置补偿指令的执行等。在没有定义的时候,将由大地坐标系来替代该坐标系1。
四、工业机器人轴与坐标系的应用
- 编程与操作
- 在编程时,需要根据任务要求选择合适的坐标系,并将机器人的运动轨迹转换为相应的坐标值。
- 在操作时,需要根据机器人的当前位置和姿态选择合适的坐标系,并将操作指令转换为相应的坐标值。
- 精度与效率
- 选择合适的坐标系可以提高机器人的运动精度和效率。
- 在进行高精度加工或装配时,需要选择工具坐标系或工件坐标系,并进行精确的坐标转换。
- 多机器人协作
- 在多机器人协作系统中,需要统一各机器人的坐标系,以实现协同工作。
- 可以通过建立公共的大地坐标系或基坐标系来实现多机器人的协作。
五、结论
工业机器人的轴和坐标系是机器人运动控制的基础,了解它们的原理和应用对于机器人的编程和操作至关重要。在实际应用中,需要根据任务要求选择合适的坐标系,并进行精确的坐标转换,以提高机器人的运动精度和效率。同时,在多机器人协作系统中,需要统一各机器人的坐标系,以实现协同工作。